Session Two
☰ MenuFirst step: Hardware installation
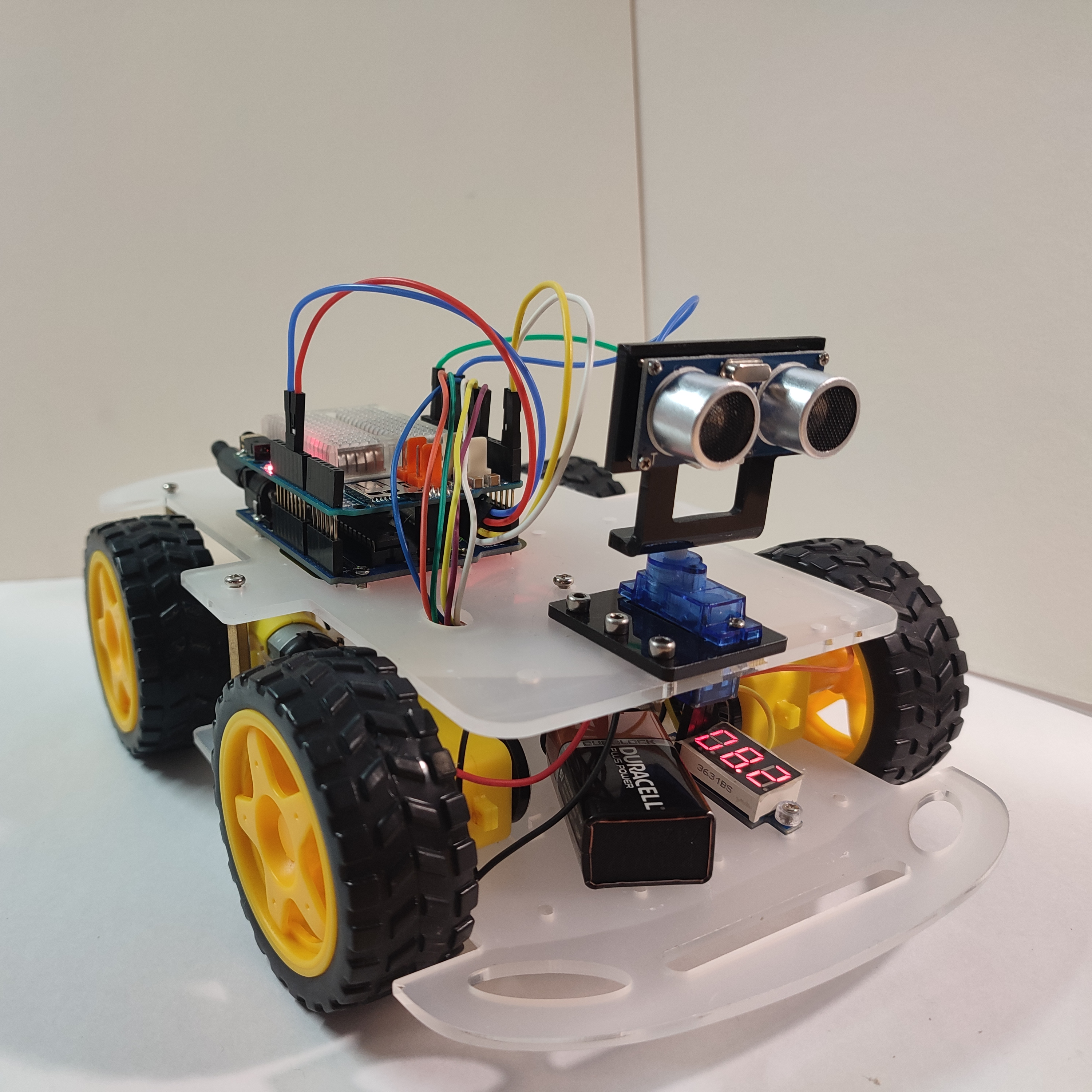
First of all, it is fundamental to add exta hardware, required to permit the robot to work. The steps to follow to have all prepared are:
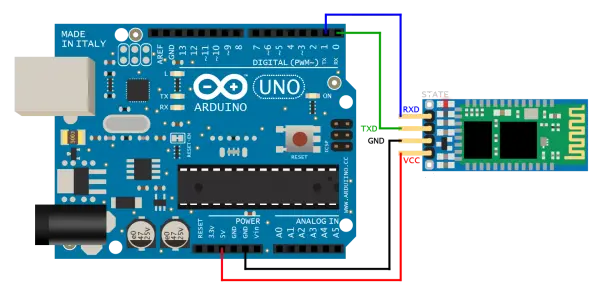
- Step 1. Install the Bluetooth module
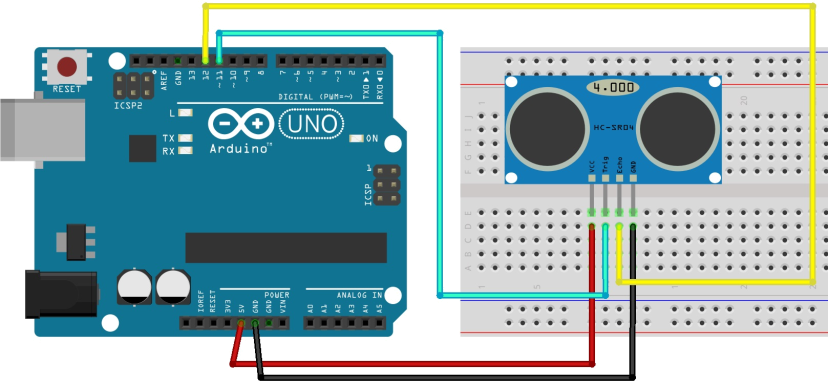
- Step 2. Install ultrasonic sensor.
After following these steps, the main purposes of the Hardware section of this session have been acomplished as the installation is almost down.
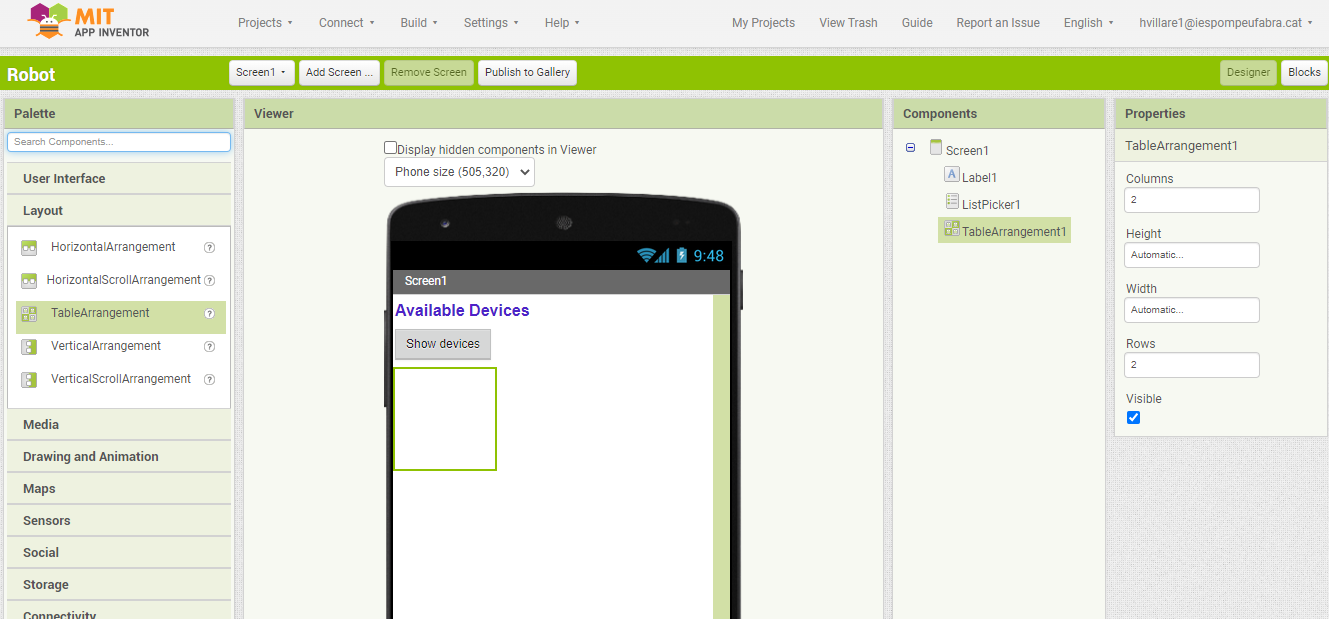
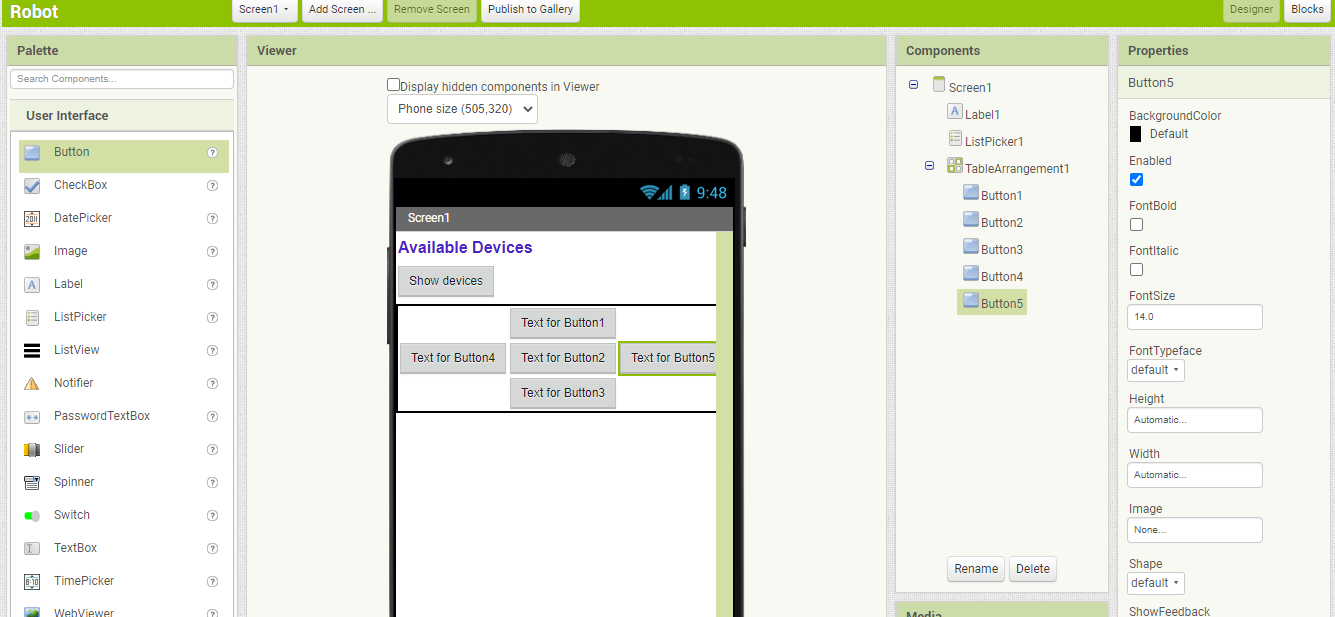
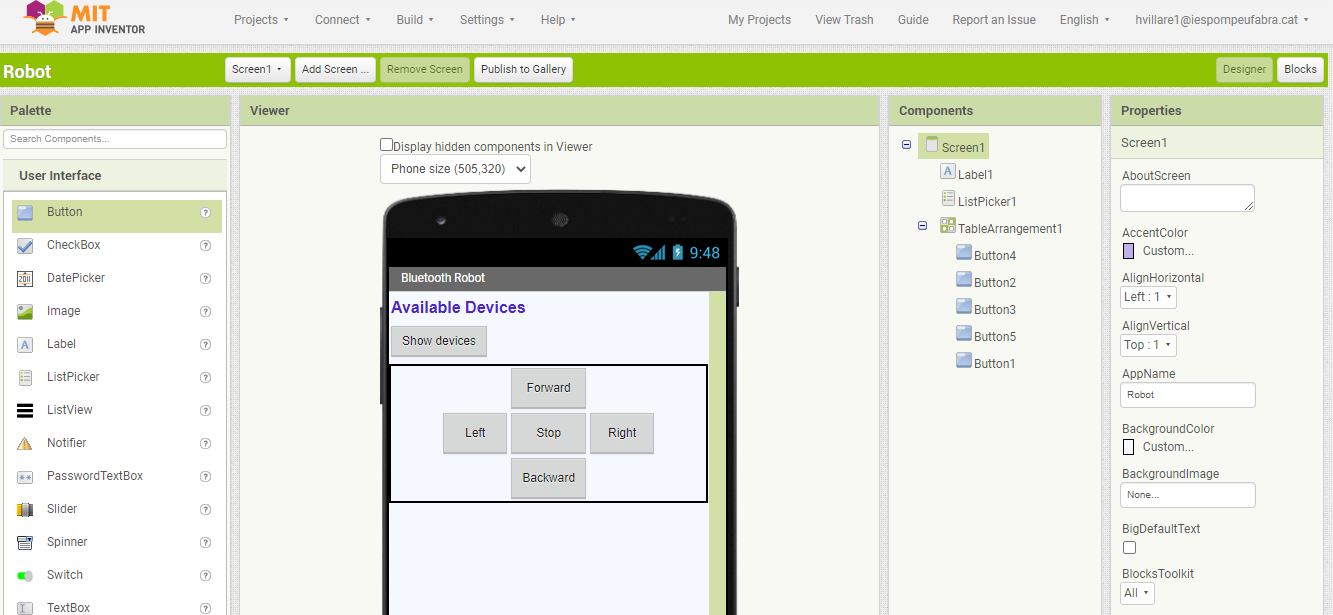
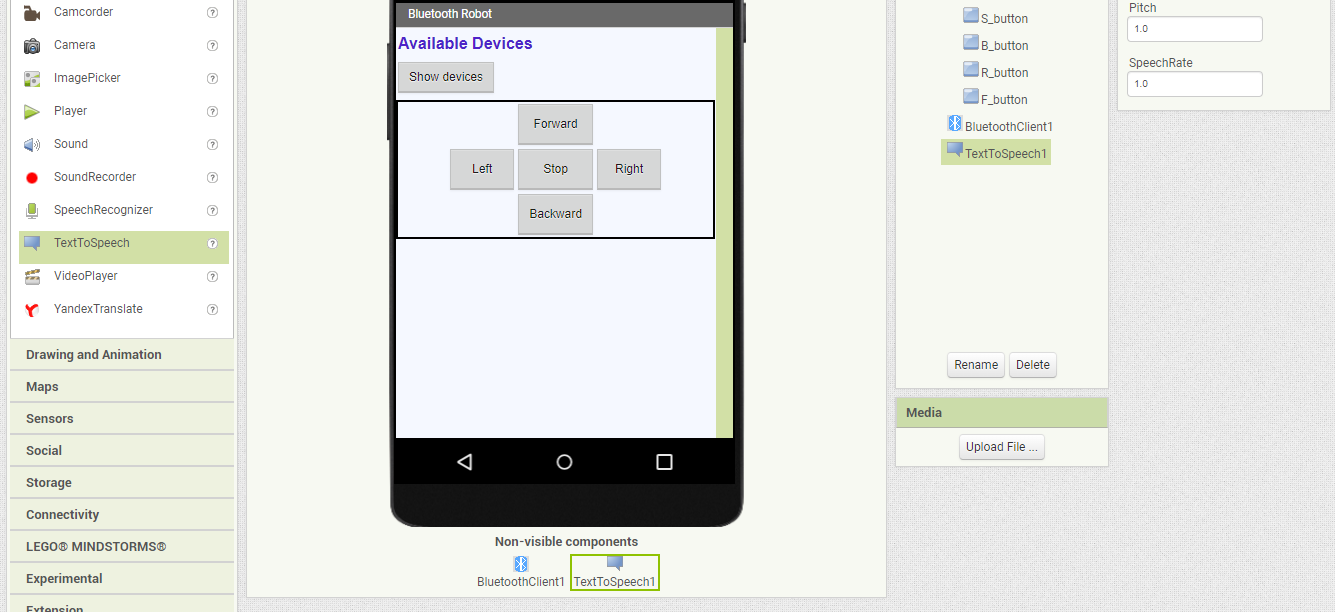
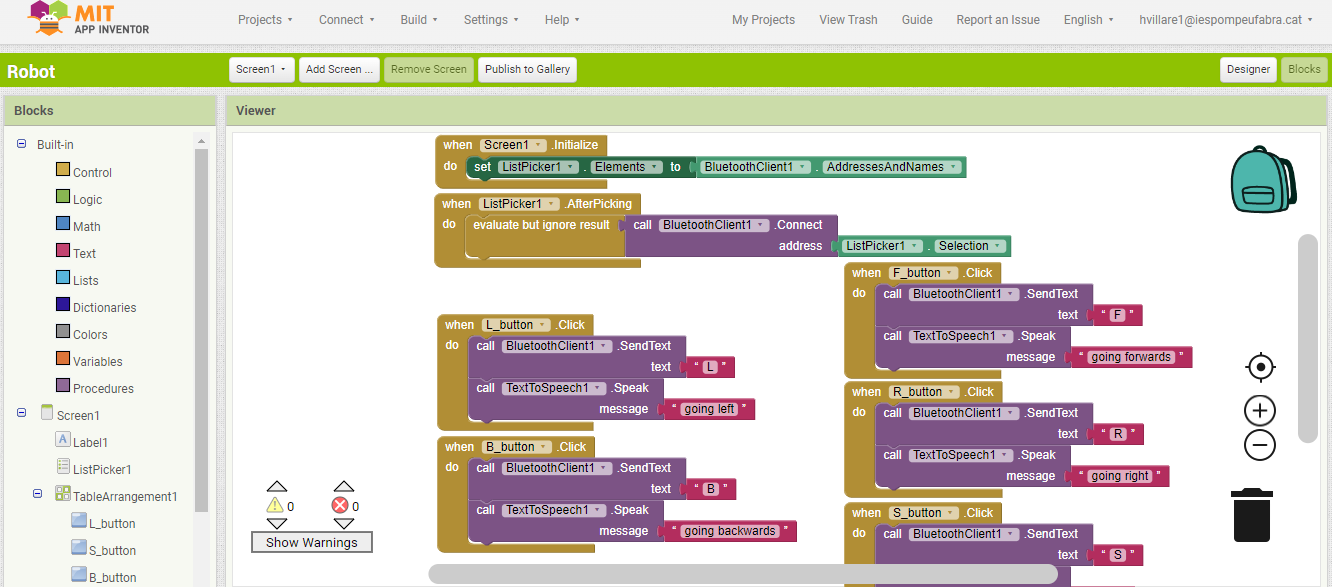
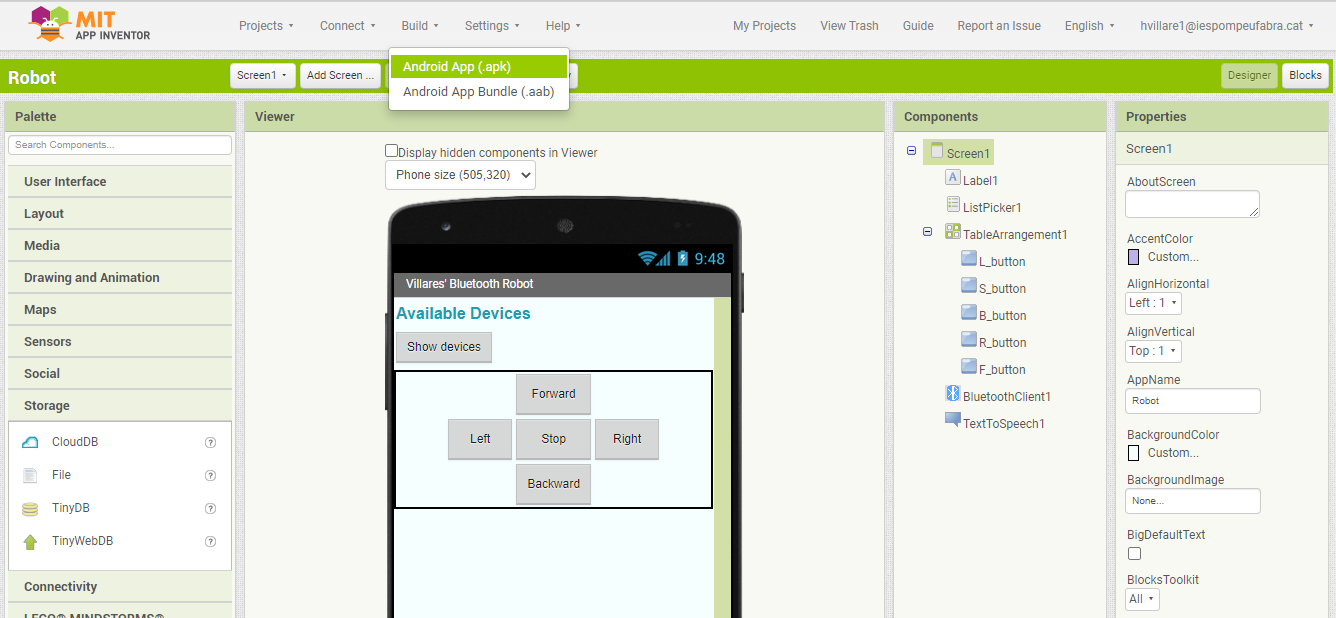
Third step: MIT App Inventor
To control the robot with a mobile, it must be created an app
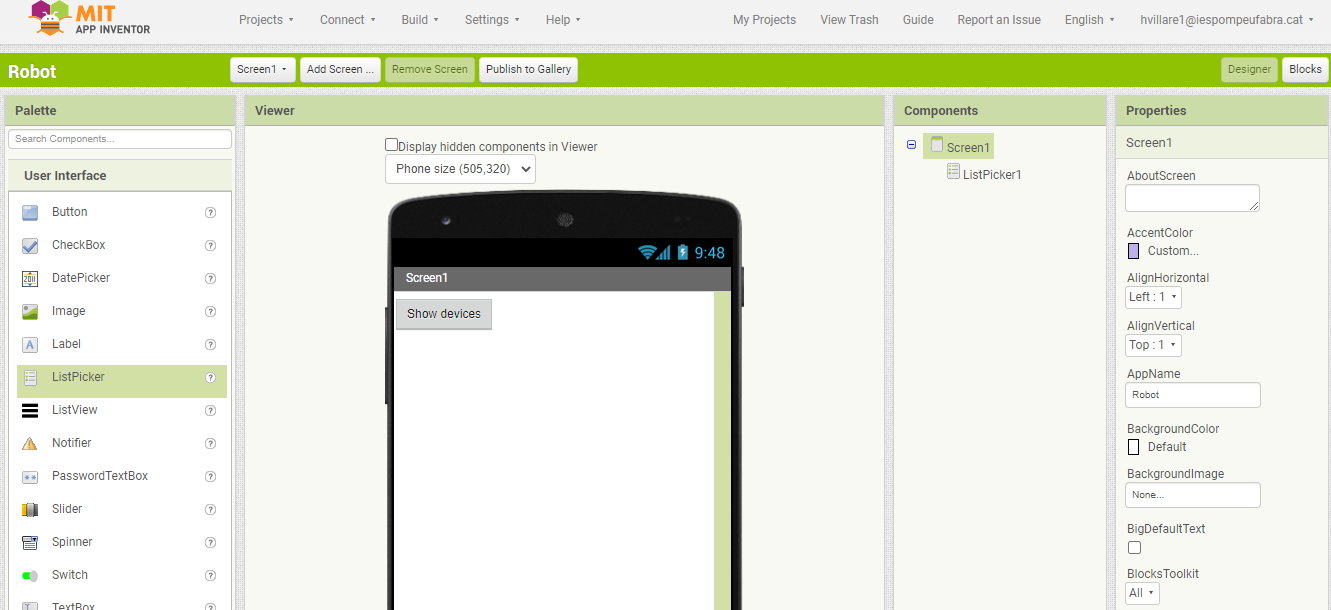
After the App is created, it is installed in an Android device scanning the QR code.
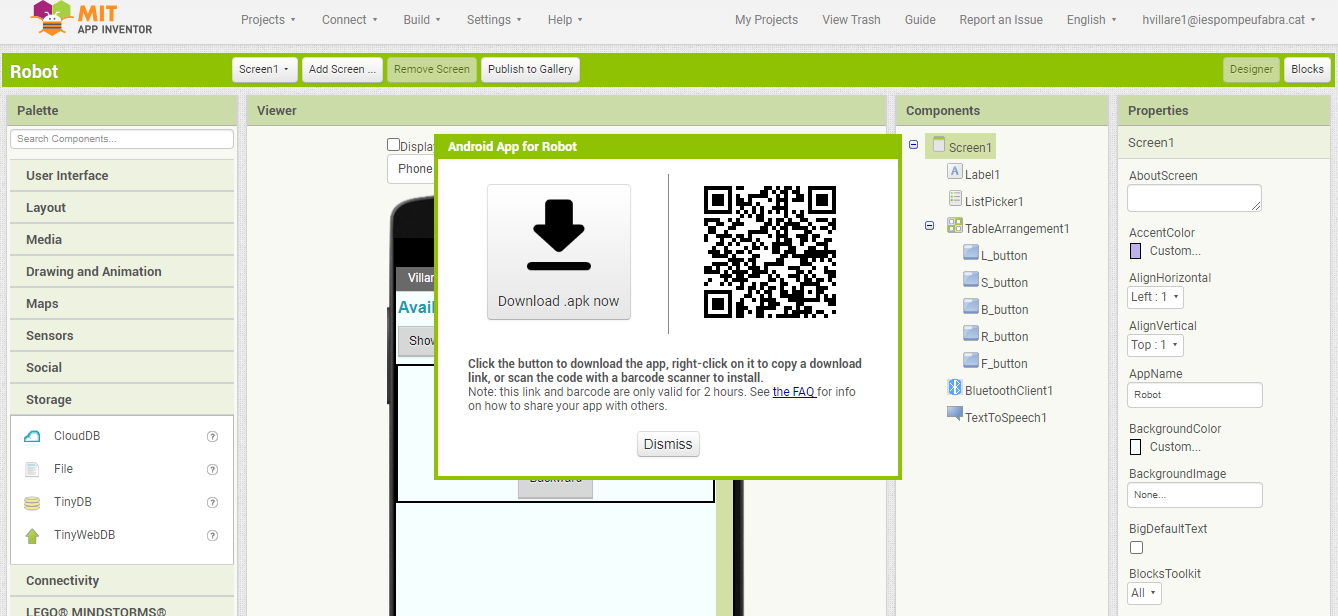
Once it is runned in the mobile, it is able to connect the mobile with the robot (only if the Bluetoth module is working as it is supposed to).
