Session One
☰ MenuFirst step: Hardware installation
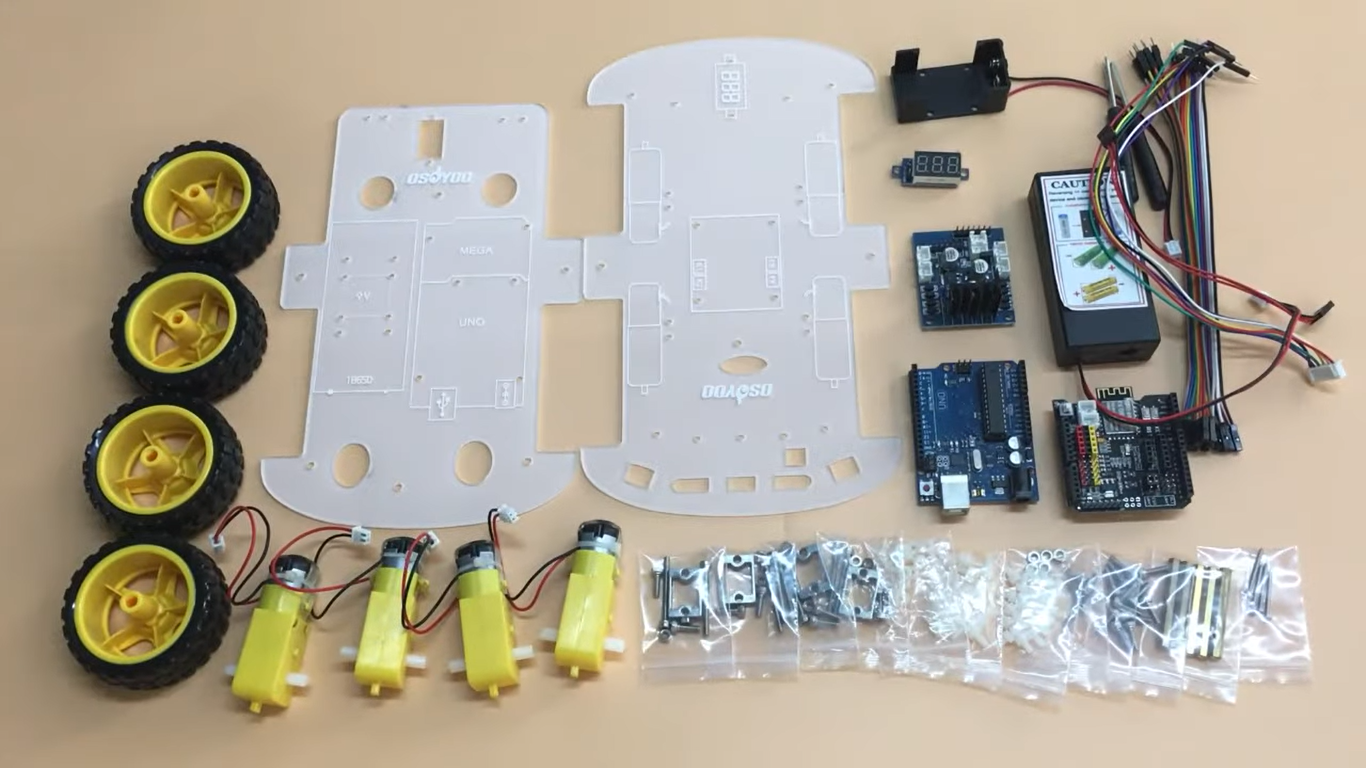
First of all, it is fundamental to prepare all the hardware required to permit the robot to work. The steps to follow to have all prepared are:
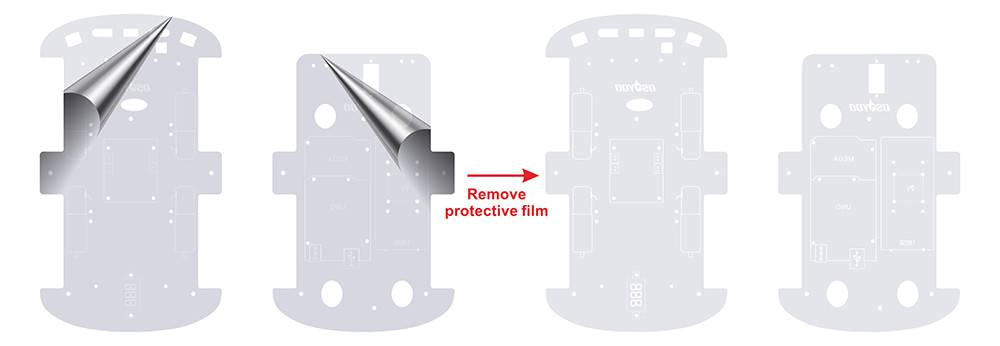
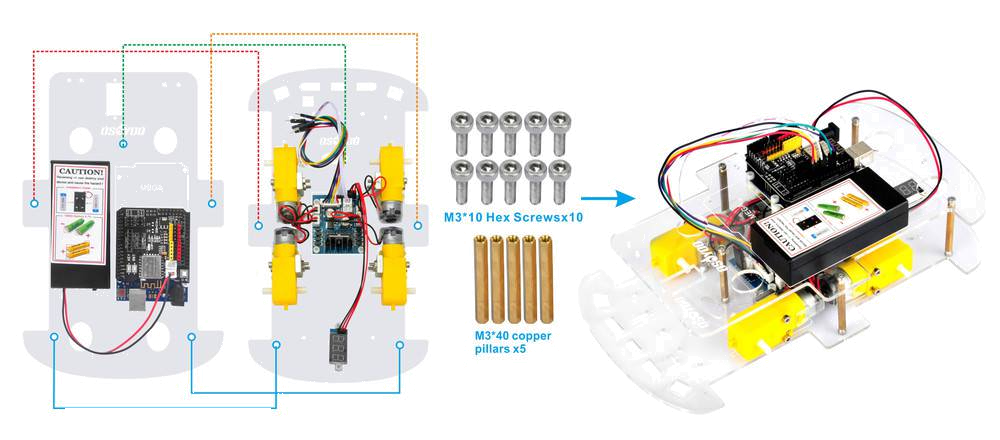
- Step 1. Remove the protective film on upper and lower car chassis
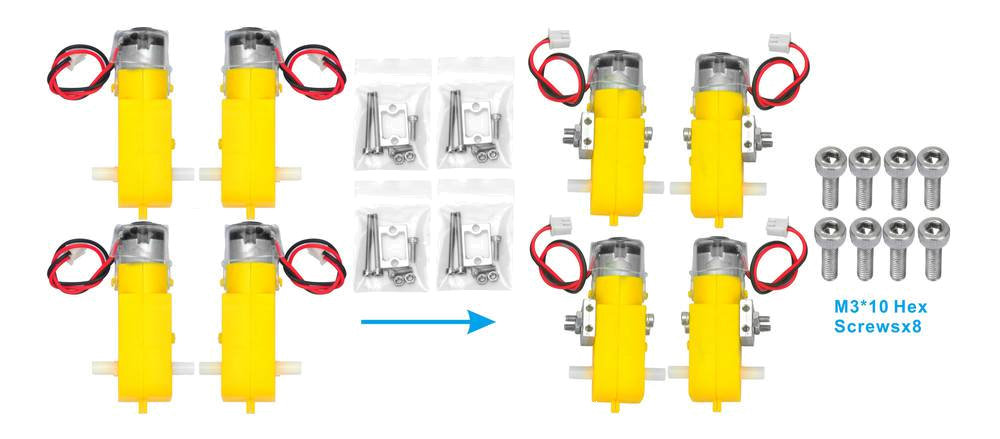
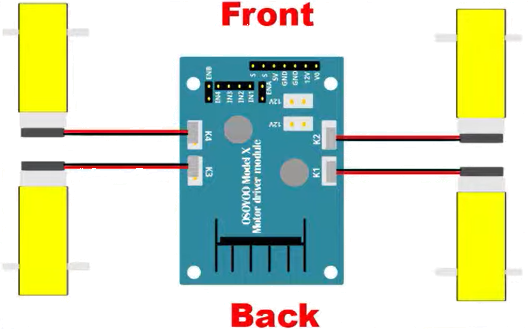
- Step 2. Fix motors with metal motor holders (check motor directions first!)
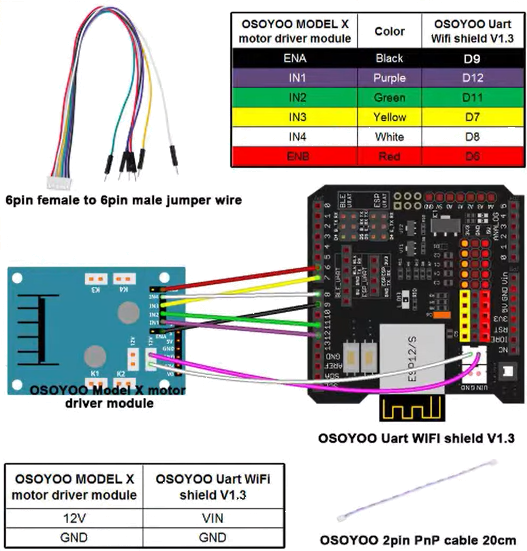
- Step 3. Intall Osoyoo Model X motor driver module in the correct direction
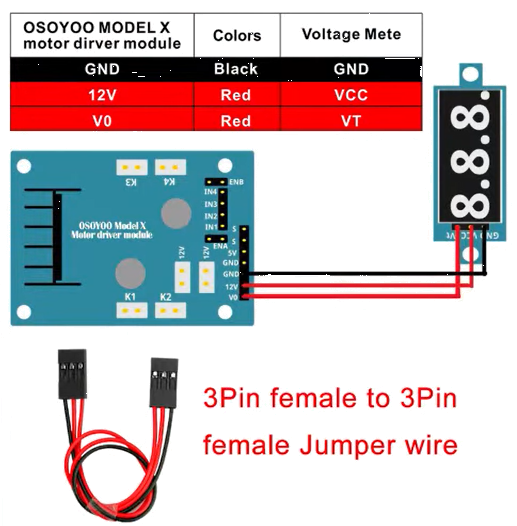
- Step 4. Install voltage meter in the lower chassis (to make sure the batteries are working)
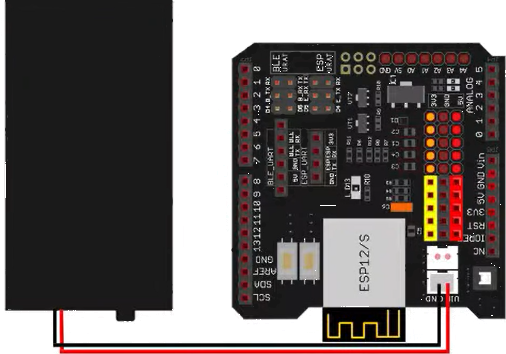
- Step 5. Install Arduino UNO in the upper chassis
- Step 6 Install battery case in the upper chassis (minim voltage: 7.2V)
- Step 7. Connect 2 connectors of the battery to the Arduino UNO
- Step 8. Connect the 4 motors to Osoyoo Model X
- Step 9. Connect voltage meter to Osoyoo Model X with 3 female to female jumper wires
- Step 10. Connect upper chase with the lower
- Step 11. Connect upper chassis to lower chassis with five copper pillars and fix copper pillars with 10pcs M3*10 hex screws
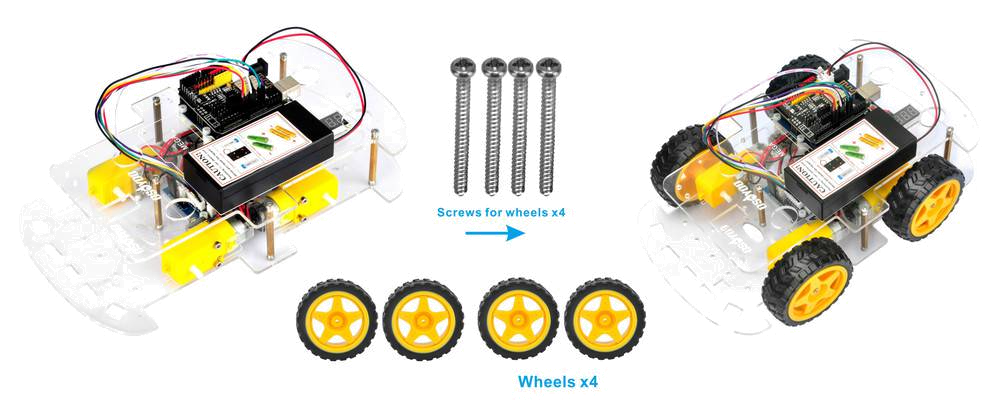
- Step 12. Install 4 wheels onto the motors




After following these steps, the main purposes of the Hardware section of this session have been acomplished as the installation is almost down.
EXTRA INFORMATION: H-bridge
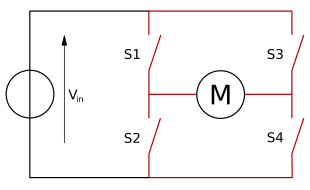
An H-bridge is an electronic circuit that switches the polarity of a voltage applied to a load. One of its applications is to allow DC (direct current) motors to run forwards or backwards.
The name is derived from its common schematic diagram representation, with four switching elements configured as the branches of a letter "H" and the load connected as the cross-bar.
DC motor Driver
Changing the polarity of the power supply to DC motor is used to change the direction of rotation. This are the two basic states of an H-bridge:
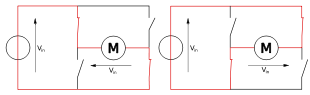
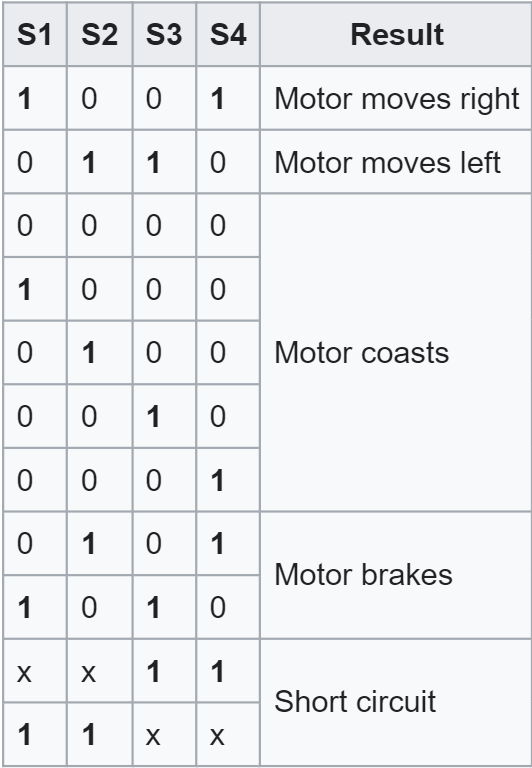
Even though it is generally used to reverse the direction (or polarity) of the motor, it can also be used to 'brake' the motor (the motor comes to a sudden stop) or to let the motor 'free run' to a stop, as the motor is effectively disconnected from the circuit.
The following table summarizes operation, with S1-S4 corresponding to the diagram above. In the table below, "1" is used to represent "on" state of the switch, "0" to represent the "off" state.